


中海達(dá)影像小碟空地一體化精細(xì)化建模
中海達(dá)影像小碟
中海達(dá)影像測量應(yīng)用篇│三維精細(xì)化建模

隨著我國“信息化”建設(shè)的不斷發(fā)展,在測繪領(lǐng)域中傳統(tǒng)的二維地圖已經(jīng)不能滿足人們對城市建設(shè)的需求,實(shí)景三維模型對地物的表達(dá)更加直觀并能真實(shí)反映實(shí)際情況,在礦山測量、城市規(guī)劃建設(shè)、防震減災(zāi)、地址勘察等領(lǐng)域得到了很好的應(yīng)用和發(fā)展。在城市數(shù)字化和智慧城市建設(shè)中,實(shí)景三維模型方面就變得尤為重要。如何快速的獲取地理空間信息并進(jìn)行實(shí)景三維建模已經(jīng)成為當(dāng)前的重要突破口。
項(xiàng)目需求
本演示項(xiàng)目以影像RTK+無人機(jī)空地一體化作業(yè)實(shí)現(xiàn)三維建模為例:
項(xiàng)目需要對主街道及兩邊仿古建筑物進(jìn)行三維重建,保存實(shí)景三維模型,測區(qū)范圍約90m*40m,涵蓋一條主街道及兩邊仿古建筑物。

痛點(diǎn)分析
對于實(shí)景三維建模,常見方式有兩種。
一、使用低空無人機(jī)傾斜攝影測量,對物體的整體結(jié)構(gòu)及紋理進(jìn)行快速獲取,但由于無人機(jī)拍攝視角有限以及飛行安全的問題,存在房檐下、被遮擋物體等區(qū)域建模后發(fā)生扭曲、空洞、無紋理等現(xiàn)象,難以滿足三維精細(xì)化建模需求。
二、使用三維激光掃描作為無人機(jī)攝影測量地面補(bǔ)充,雖然其技術(shù)精度高,模型效果完整,但存在獲取的數(shù)據(jù)信息量大、設(shè)備昂貴、工作效率低等缺點(diǎn),性價比較低。
實(shí)施方案
影像RTK可以在地面上以平視的角度、對建筑物進(jìn)行拍照,拍攝角度、位置和無人機(jī)航測視角天然互補(bǔ),可以有效補(bǔ)充建筑物局部細(xì)節(jié)、紋理。通過低空無人機(jī)攝影測量和影像RTK攝影測量等多種測量方式相結(jié)合的方法,既能保留大場景三維模型的完整性,又可以突出局部細(xì)節(jié)特征,所得的三維模型可以大大擴(kuò)展攝影測量的服務(wù)領(lǐng)域。

▲外業(yè)作業(yè)流程
項(xiàng)目內(nèi)外業(yè)實(shí)施
外業(yè)實(shí)施:
本次外業(yè)數(shù)據(jù)采集使用一臺大疆精靈4RTK無人機(jī)和兩臺影像RTK主機(jī)協(xié)同作業(yè)。為確保無人機(jī)和影像小碟RTK主機(jī)采集的照片POS位置保持一致,本項(xiàng)目數(shù)據(jù)采集無人機(jī)和RTK統(tǒng)一使用中國移動CORS差分服務(wù),坐標(biāo)系統(tǒng)為CGCS2000。

▲外業(yè)作業(yè)
數(shù)據(jù)處理:
因項(xiàng)目涉及無人機(jī)航測數(shù)據(jù)及影像RTK數(shù)據(jù),所以數(shù)據(jù)處理采用TJH.DP_Smart專業(yè)版軟件進(jìn)行數(shù)據(jù)處理。首先分別建立區(qū)塊導(dǎo)入兩組影像RTK數(shù)據(jù),這里導(dǎo)入照片后需要單獨(dú)導(dǎo)入影像RTK 的POS數(shù)據(jù),這里需要選擇與無人機(jī)相同坐標(biāo)系統(tǒng),以便后續(xù)合并空三數(shù)據(jù)。
▲影像RTK數(shù)據(jù)處理(左右滑動查看更多)
隨后建立單獨(dú)區(qū)塊,導(dǎo)入無人機(jī)數(shù)據(jù)進(jìn)行處理。因無人機(jī)照片自帶POS及傾角等數(shù)據(jù),導(dǎo)入后直接進(jìn)行空三計(jì)算即可。
▲無人機(jī)數(shù)據(jù)處理(左右滑動查看更多)
在分別完成影像RTK和無人機(jī)數(shù)據(jù)處理后,分別導(dǎo)出對應(yīng)的空三XML文件,通過軟件合并三組空三數(shù)據(jù),隨后選擇項(xiàng)目所需區(qū)域進(jìn)行三維模型渲染重建。
▲合并空三三維重建(左右滑動查看更多)
成果展示

▲無人機(jī)單獨(dú)建模(左圖)與無人機(jī)聯(lián)合影像RTK建模對比(右圖)

▲無人機(jī)單獨(dú)建模(左圖)與無人機(jī)聯(lián)合影像RTK建模對比(右圖)

▲影像RTK內(nèi)業(yè)成果(左右滑動查看更多)
項(xiàng)目總結(jié)
通過本次測試,我們不難發(fā)現(xiàn)利用高精度RTK結(jié)合高清攝像頭進(jìn)行影像測量的方式可以有效的和無人機(jī)航測互補(bǔ),最大程度保證三維模型的完整度。主要表現(xiàn)在以下幾點(diǎn):
1、影像RTK協(xié)同無人機(jī)空地一體化作業(yè)方案,可以有效解決無人機(jī)攝影測量過程中因視角和飛行安全限制導(dǎo)致模型局部發(fā)生扭曲、空洞、無紋理問題,滿足三維建模場景的使用需求。
2、影像RTK協(xié)同無人機(jī)空地一體化作業(yè)方案,外業(yè)操作簡單工作量小,工作效率高且具備極高的成本優(yōu)勢。 空地一體化精細(xì)化建模?還得看影像小碟。
聲明:以上內(nèi)容來源于網(wǎng)絡(luò)文章轉(zhuǎn)載,轉(zhuǎn)自中海達(dá)小碟公眾號文章,出于傳遞信息及學(xué)習(xí)之目的,不代表本網(wǎng)站的觀點(diǎn)、立場,本網(wǎng)站不對其真實(shí)性負(fù)責(zé)。
更多相關(guān)

【北斗】與世界分享中國科技
2018年12月27日,中國衛(wèi)星導(dǎo)航系統(tǒng)管理辦公室宣布,“北斗三號基本系統(tǒng)建成,將為全球提供服務(wù)。”這標(biāo)志著北斗系統(tǒng)服務(wù)范圍由區(qū)域擴(kuò)展為全球,我國自主建設(shè)、獨(dú)立運(yùn)行的衛(wèi)星導(dǎo)航定位系統(tǒng)正式邁入全球時...
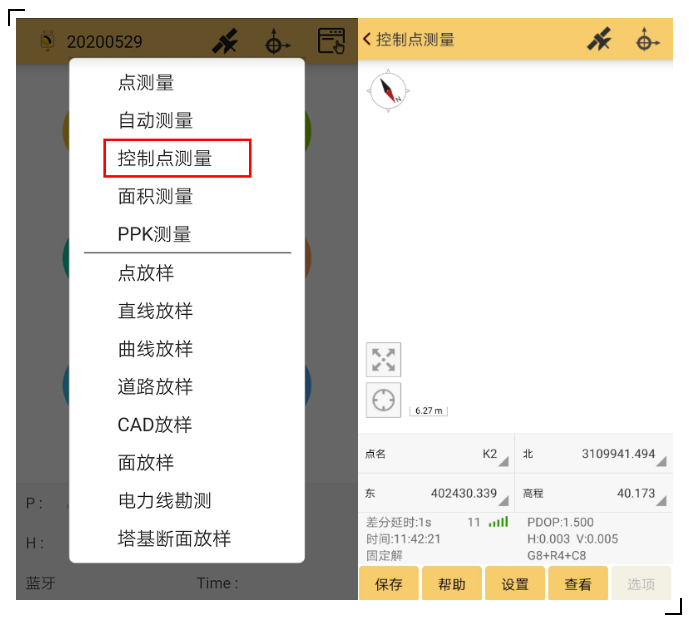
RTK控制點(diǎn)測量攻略分享,新手秒變高手!
在RTK進(jìn)行控制點(diǎn)測量時,為了提高測量的精度,避免人為誤差,需要用到“控制點(diǎn)測量”功能。 RTK控制點(diǎn)測量操作攻略 首先用支架將移動站固定在控制點(diǎn)上,對中整平。打開手簿的工程之星5.0軟件主界...

中緯ZAL832水準(zhǔn)儀在測量參賽中表現(xiàn)優(yōu)秀
隨著科技發(fā)展的日新月異,我們工程測量中的測繪儀器設(shè)備也發(fā)生了革命性的變化,但是光學(xué)水準(zhǔn)儀始終堅(jiān)守在一線陣地,為地形高低圖測繪以及各種工程建設(shè)提供高程控制。不久前在江蘇南通新區(qū)職工技能大賽中,中建三局的...

徠卡BLK360有哪些獨(dú)特優(yōu)勢?
徠卡BLK360三維激光掃描儀是一款革命性的便攜式三維激光掃描儀,憑借其卓越的性能和用戶友好的設(shè)計(jì),在建筑、工程、施工、文化遺產(chǎn)保護(hù)等領(lǐng)域得到了廣泛應(yīng)用。以下詳細(xì)介紹其優(yōu)勢:1.極致便攜,輕松掌控:...

徠卡RTC360三維激光掃描儀在某石化工廠數(shù)字化中的應(yīng)用
一、背景 石化工廠的安全運(yùn)維是一項(xiàng)重要工作。但是如果工廠工程資料保存不完整或者太過陳舊,不能反映廠區(qū)真實(shí)現(xiàn)狀,就難以實(shí)現(xiàn)石化工廠的數(shù)字化管理。一般使用三維激光掃描儀完成工廠數(shù)字化可以獲取廠區(qū)的精...

其域靈光L2三維激光掃描儀 有何優(yōu)勢?
其域靈光L2三維激光掃描儀的核心優(yōu)勢三維激光掃描技術(shù)近年來在測繪、建筑、工業(yè)檢測、文物保護(hù)等領(lǐng)域得到廣泛應(yīng)用,而其域靈光L2三維激光掃描儀憑借其卓越的性能和智能化設(shè)計(jì),成為行業(yè)內(nèi)的優(yōu)選設(shè)備之一。該設(shè)備...

徠卡TS16全站儀+重復(fù)檢測程序讓基坑監(jiān)測更容易
行業(yè)背景 隨著城市建設(shè)的發(fā)展,城市建筑的基坑開挖深度越來越深。基坑的開挖、錨固和降排水等工作,打破了地基原有的平衡狀態(tài),引發(fā)了土體性狀、周邊環(huán)境、鄰近建筑、地下設(shè)施的變化。根據(jù)相關(guān)規(guī)范規(guī)定,開挖...

中海達(dá)RTK如何一鍵設(shè)置基站
中海達(dá)RTK設(shè)備在設(shè)置基站時,可以采用一鍵設(shè)置的方式簡化操作流程。具體操作步驟可能根據(jù)設(shè)備型號的不同略有差異,但以下是一些通用的步驟和指導(dǎo),適用于中海達(dá)RTK的一些型號,如V30、V60和V90等。1...
 環(huán)球測繪微信
環(huán)球測繪微信